Posts Tagged blender
A simple traffic simulator
Several years ago, while shopping in Target, I was thinking about making a simple traffic simulator. I’m not entirely sure what sparked the idea — I think at the time, I was interested in the effect that a few bad (or slow) drivers could have on traffic. Or maybe it was about how long it took for a traffic slow-down to clear up.
Anyway, when I was thinking of things to work on over this past Christmas break, this was one of the ideas that resurfaced. So I decided to poke around with it. Given that I forgot why I wanted to do it in the first place, I should have known it was going to be hard to decide on a reasonable end state for the project–and no I didn’t look to see what was out there.
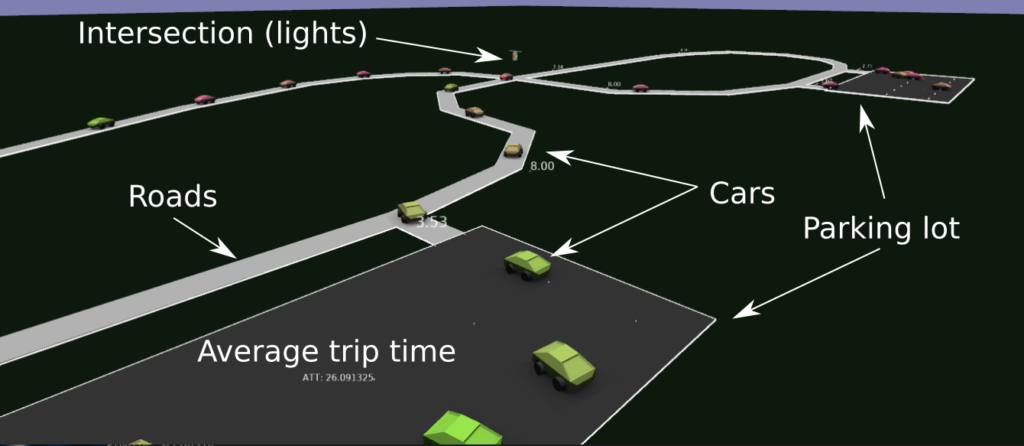
I guess I got the simulator to the point where cars sped up, slowed down for other cars, slowed down for intersections (and corners), and randomly plotted their path (using updating estimates of speed for each of the road segments). I didn’t spend all that much time on the visualization, so it doesn’t look that great. Here’s a rendering, with some annotations below:
Overall, I guess there were some fun little problems to solve: like how to deal with intersections, implementing the smooth interpolation around corners, determining when to slow down, trying to make things more efficient, etc..
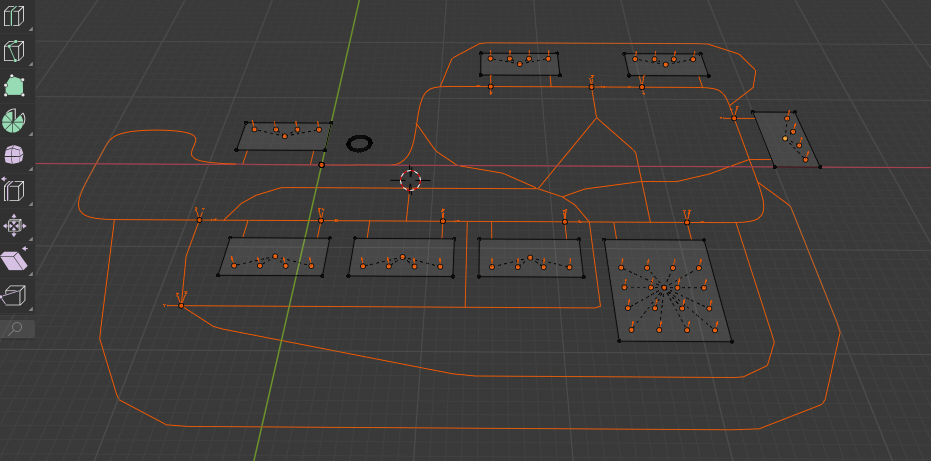
As usual, the level editor is in Blender, and it was kind of fun just setting up new levels (adding new roads, intersections, etc.) and watching the simulation to see what happened (when cars cut each other off, how it slows down traffic, and when cars start taking long routes due to traffic on shorter ones). Felt a bit like adult Lego.
I spent a bit of time optimizing the simulation, so I think it could simulate about 50K cars (in a single thread)…although I only ever added 1k cars.
Anyway, most of the features of the simulation plus some actual renderings from the simulator are in the following video (use the chapter annotations see interesting points)
Source code and some more details about the project here:https://github.com/nbirkbeck/dsim
Game Developer’s Open Source Handbook
I was recently thumbing through some books at the library, and came across the Game Developer’s Open Source Handbook by Steven Goodwin. As a longtime Open Source user, I had to look into this book to Open my eyes to some other projects.
The book as a pretty good intro to the origins of the free and open software movements as well as notes on why and when it is appropriate to use such codes in games. There is also some summaries of open source licenses and notes on when different components using different license can be mixed (and also what is required of you when you are shipping a title).
For the most part, however, I was more concerned with the tools that I hadn’t know about. The book covers development in a GNU/Linux environment. For graphics, there is info on some 2D (e.g., SDL) and 3D engines (CrystalSpace, Irrlicht, and Ogre). I was interested to find out that there was libraries mentioned in there for interactive consoles (OGLCONSOLE) and font handling. I have a small wrapper library for rendering ttf fonts in GL using freetype2, but the FTGL seems like a very worthy alternative.
There is a chapter on audio, something that I have not been too concerned with in the past. I have barely used OpenAL (in my GT racer demo), and have written to the /dev/dsp files in Linux before (NES emulator). I have also used FMOD for mp3 playback in an old bomberman implementation (I believe they have a non-commercial license). The book details some tools for sound conversion, although I pretty much always rely on mplayer, ffmpeg, or gstreamer for video and sound needs.
For physics there are also several choices. ODE is a reasonable solution (discussed in the book), which I have played around with before. I think that Bullet and Box2D were probably too recent to include in the book. The book mentions some of the other libraries useful for collision detection (e.g., OPCODE).
There are also several libraries listed for networking, including SDL_net, torque network library, and clanNetwork. I have personally never used any of these, but I figure they are probably worth looking into (although this is one of the easier areas to write your own).
Scripting was something that I was actually a bit more interested in. The book covers some of the details of using Lua, and possibly Guile (with Python, Java, and some other dynamically typed languages coming in as mentionables). I was a bit dissapointed that there wasn’t more detail in these sections, but I guess that is because it was something that I wanted to know more about.
There was a bunch of other useful utility libraries mixed in, including some for parsing xml (e.g., expat), and several libraries for GUI controls (CEGUI, SDLtk, GG, GUIChan, ParaGUI). After taking a brief look at some of these, I ranked them in this order: GG, GUIchan, paragui, SDLtk. It was interesting to find out about the generic game tree library (GGTL), and internationalization with gettext (something that I haven’t used ever, but the book provided a good enough overview of its capabilites).
Then for tools and production, some of the well known apps were mentioned (e.g., Blender, gimp, audacity, ImageMagick, ffmpeg, mplayer). Some other tools for modeling included JPatch and for film editing there was Kino and Cinepaint.
For the most part, the book brought my attention to a bunch of other middleware-like components that I either wasn’t aware of, or had forgotten about. The above list isn’t exhaustive, and I’m sure there new libraries for each of the components.
Iterative mesh deformation tracking

Patches on mesh (left) and a different target mesh
Another idea that interested me from ICCV (or 3DIM actually) was related to tracking deforming geometry, using only raw geometry no color. The paper in particular ( Iterative Mesh Deformation for Dense Surface Tracking, Cagniart et al.) didn’t require even geometric feature extraction, but rather relied on a non-rigid deformation scheme that was similar to iterated closest points (ICP). The only assumption is an input geometry that has the same topology of what you would like to track. As for the ICP component, instead of doing this for the entire model, the target mesh contributes a displacement (proportional to cosine between normals) to its closest vertex on the deforming source mesh. The source mesh is then partitioned into a set of patches, and each patch tries to compute a transformation that satisfies the point-wise constraints. The positional constraint on the patch center is then used in a Laplacian (or more specifically, the As-Rigid-As-Possible (ARAP) Surface deformation framework) to deform the geometry. This is then iterated, and a new partitioning is used at each frame. To ensure some more rigidity of the model, the positional constraint on the patch center is influenced by it’s neighboring patches, as well as by the transformation of the original source mesh. Look at the paper for full details.
I needed the ARAP for some other project (see previous blog), and decided to go ahead and try to implement this (I think it was actually last Friday that I was playing around with it). Anyhow, this week I knew that I had to test it on some more realistic data; my first tests were of tracking perturbations of the same geometry (or of a deforming geometry with the same topology). To generate some synthetic data, I rendered 14 viewpoints of a synthetic human subject performing a walking motion (the motion is actually a drunk walk from the CMU motion capture database). For each time frame, I computed the visual hull and used the initial geometry to try and track the deforming geometry. This gives a consistent cross-parameterization of the meshes over the entire sequence.
After tweaking some of the parameters (e.g., the number of iterations, and the amount of rigidity, the number of patches), I was able to get some decent results. See some of the attached videos.
Links to movies (if the above didn’t work):
Source blender file (to create the sequence, some of the scripts I use often are in the text file): person-final-small
Latest Movies



Random Movies



